Because of my lack of experience in fabrication, hydraulics and limited funds I thought it would be a smart move to start with a smaller project then a motorcycle engine leaning reverse trike. Also because human powered doesn’t require registration by the motor vehicle department I’ll be able to test this in my neighborhood. So by building this first I’ll get to practice my fabrication skills on something that probably won’t go much over 15 miles an hour, so if my welds break I won’t break my neck. The other important aspect of building this is to learn more about how the three different modes of steering and leaning work and feel to the driver in a reclined position using a steering wheel.
The basic design will consist of hacking apart a cruiser bike with a coaster brake, making two front wheels out of aluminum honeycomb and salvage bike rims. I plan on using go kart hubs, steering wheel and shaft, and will either use a small rack and pinion or geared lever coming off of the steering shaft to drive two closed circuit hydraulics systems. One system is for steering the other for leaning. Hydraulic valves will control the flow to allow me to operate the trike in three different modes, normal steering, counter steering, and free to caster. I may eventually also use this human powered reverse trike as a testbed for the sensors and electronics for controlling the hydraulic valves automatically. This will require the addition of a heavy 12 V battery so I might also add an electronic assist to the drivetrain.
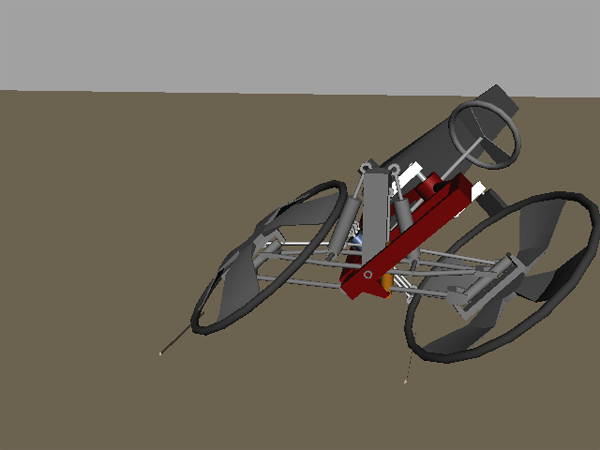
This is an animated crude 3-D model of my human powered leaning reverse trike. It will be a test bed for the final product which will be a motorcycle engine powered leaning reverse trike. This trike will use a system of hydraulic valves and actuators to allow three different modes of steering. Actuators acting as pumps in duel closed hydraulics circuit are driven by a rack and pinion connected to the steering wheel.
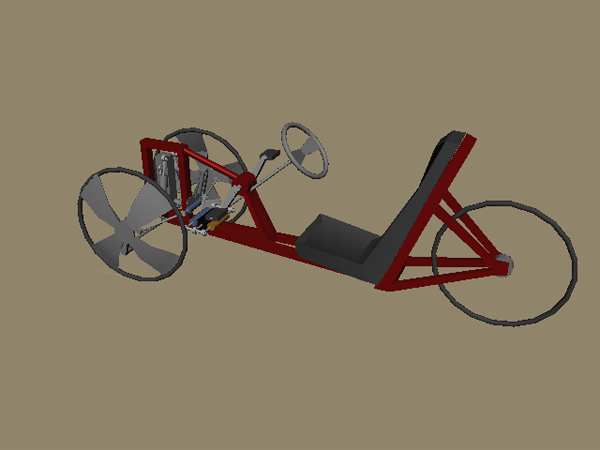
The three modes are:
Normal Steering – The trike does not lean. Turning the steering wheel to the left turns the wheels to the left, like driving a car.
Counter Steering – The wheels are turned in the opposite direction of the steering wheel forcing the trike to lean and turn in the direction the wheel was turned, just like a motorcycle.
Free to Caster – Turning the steering wheel leans the trike in that direction at the same time some counter steer is applied to the wheels to assist in the leaning effort, but wheels are free to caster to the proper angle of turn based on the angle of lean.
The final motor powered version will use sensors and a computer controller to switch between modes for optimum performance and rider comfort. Power assist will be added to the steering shaft for the heavier vehicle.
A pdf file with a description of my leaning reverse trike hydraulic circuits is available here.